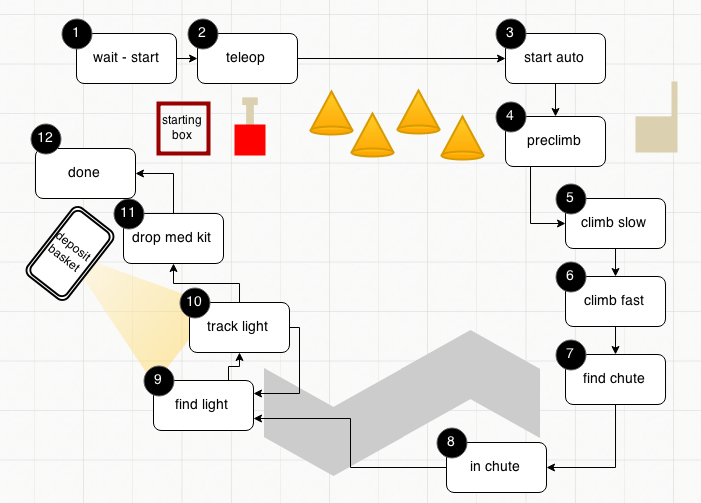
The Search and Rescue Robot (SaRR) was a team challenge I completed for a mechanical design class at Princeton. It simulates a robot that delivers medical aid to an injured human through rough terrain, such as rubble. The simulation was achieved through completing a set of tasks on a predetermined course. These tasks were defined as follows, in sequential order:
- Retrieve a 4 in x 4 in x 8 in object (a medical kit) and store it on/within itself.
- Travel through an area of flat terrain (linoleum floor) while avoiding obstacles such as pylons (tall cones) and bumps (small cones or wooden planks).
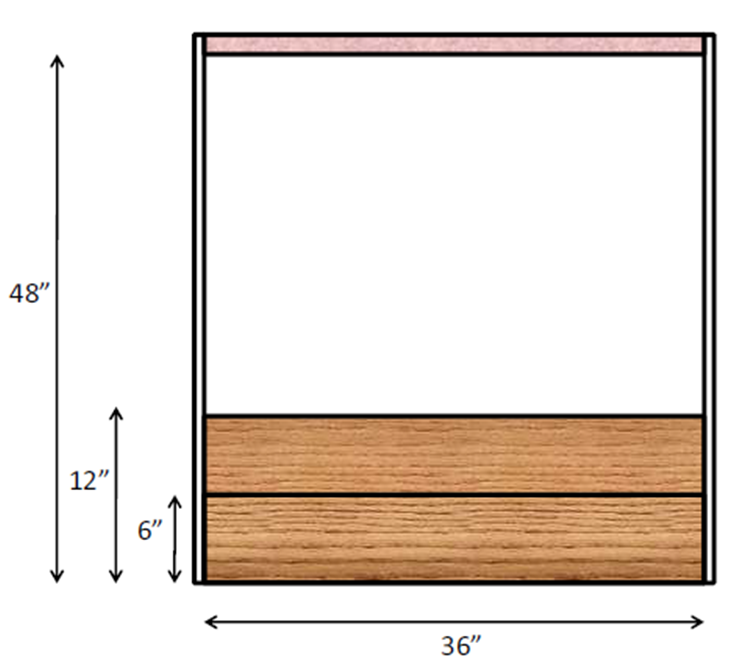
- Traverse a 12 inch wall consisting of two 6 inch steps.
- Travel through a 3 ft wide chute that is about 15 ft long.
- Upon exit from the chute, detect a bright light source (a high-luminosity flashlight), and travel towards this light source.
- Upon reaching a sufficiently close distance to the flashflight, deposit the stored medical kit into a 4 in x 11 in basket located directly on top of the flashlight.
- Tasks 1 and 2 could be completed with open-loop (remote) control, while tasks 3-6 had to be completed with closed-loop (autonomous) control.
- The dimensions of the robot (in some configuration) could not exceed 3 ft x 3 ft x 3 ft.
- The total cost of of the robot could not exceed $500 in parts
- Course time was used as a figure of merit
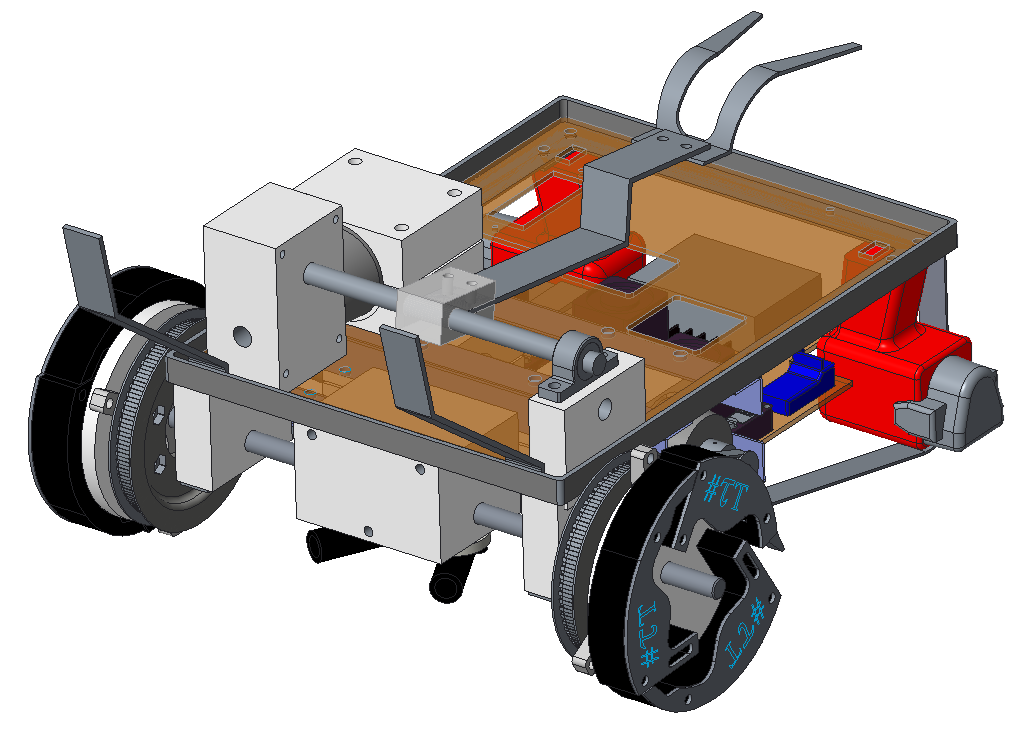
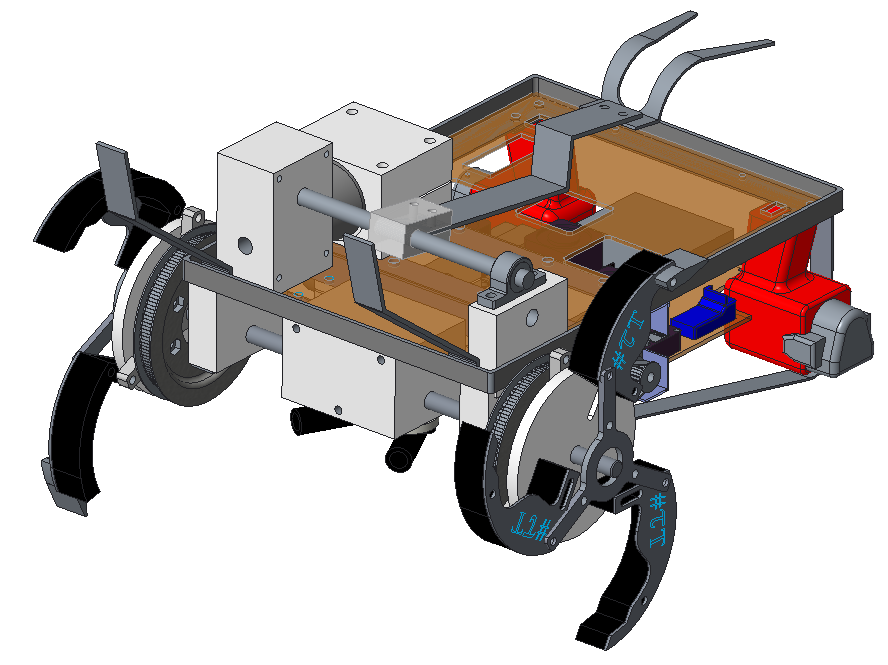
Our team's entry featured a passively transforming wheel design inspired by a similar all-terrain robot developed at Seoul National University. Through the use of torsion springs, the natural configuration of the wheels is stowed (circular), to allow for fast travel over smooth terrain. When the wheels encounter a significant obstacle (ex. the wall), a "trigger" foot unfurls as the wheels spin against the obstacle, expanding the wheels into a three-pronged "climbing" configuration by means of a slot disk. This adds the climbing ability to the robot without resorting to a rear drive train (which was replaced with skids), thereby requiring less actuators and providing a faster all-terrain robot.
Medical kit retrieval and stowage was achieved through a passive, hooked, two-prong arm. Sensing for feedback control was accomplished through IR sensors, photoresistors, Hall Effect sensors, and a limit switch. Drill motors and accompanying batteries were used as actuators and power sources, and the control board was an Arduino Teensy.
On test day, the robot was able to complete the entire Search and Rescue course in an average run time of 31.3 seconds.